International Conference on Computer Vision, Theory and Applications (VISAPP 2026)
Consistent Multi-Lane Tracking with Temporally Recursive Spline Modeling
Sanghyeon Lee
Donghun Kang
Min H. Kim
KAIST
Hyundai Motor Company
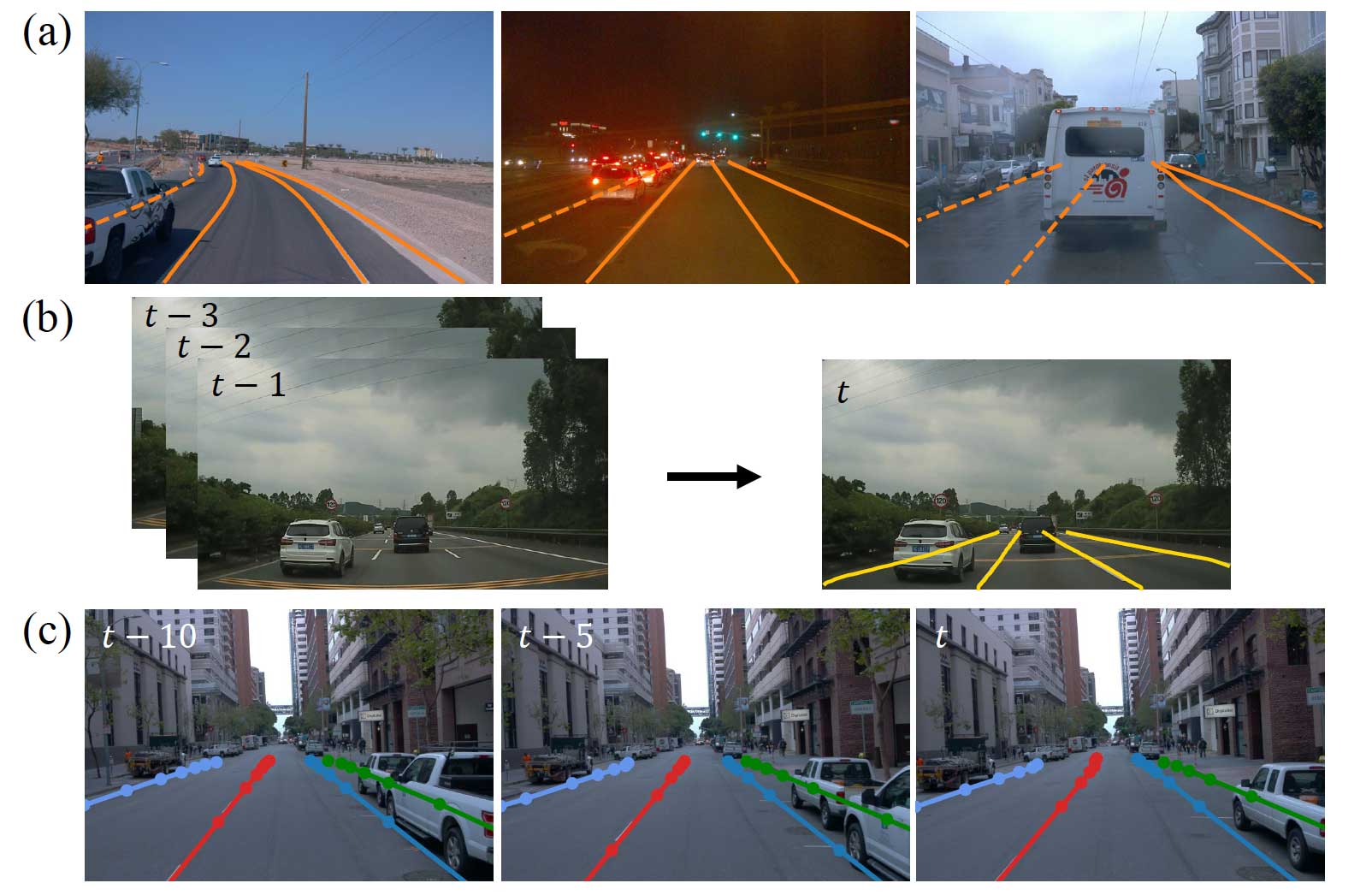
(a) Single-image lane detection struggles with obstructions and lighting issues, causing flickering and missing lane markings.
(b) Video-based methods improve accuracy using multiple frames but lack consistent lane identity tracking across frames.
(c) Our method uses temporally recursive spline modeling to continuously track multiple lanes with stable identity association across frames. Distinct colors represent unique lanes, while predictive control point updates ensure precise, uninterrupted lane tracking in complex scenes.
Supplemental video results
Abstract
Lane recognition and tracking are essential for autonomous driving, providing precise positioning and navigation data for vehicles. Existing single-image lane detection methods often falter in real-world conditions like poor lighting and occlusions. Video-based approaches, while leveraging sequential frames, typically lack continuity in lane tracking, leading to fragmented lane representations. We introduce a novel approach that addresses these challenges through temporally recursive spline modeling, a robust framework designed to maintain consistent, multi-lane tracking over time. Unlike traditional methods that limit tracking to adjacent lanes, our technique models lane trajectories as temporally recursive splines mapped in world space, capturing smooth lane continuity and enhancing long-term tracking fidelity across complex driving scenes. Our framework incorporates 2D image-based lane detections into a recursive spline model, facilitating accurate, real-time lane trajectory representation across frames. To ensure reliable lane association and continuity, we integrate a Kalman filter and an adaptive Hungarian algorithm, allowing our method to enhance baseline detectors and support consistent multi-lane tracking. Experimental results demonstrate that our temporally recursive spline modeling outperforms conventional approaches in lane detection and tracking metrics, achieving superior continuous lane recognition in challenging driving environments.
BibTeX
@InProceedings{Lee:visapp:2026,
author = {Sanghyeon Lee and Donghun Kang and Min H. Kim},
title = {Consistent Multi-Lane Tracking with
Temporally Recursive Spline Modeling},
booktitle = {Proc. Int. Conf. Computer Vision,
Theory and Applications (VISAPP 2026)},
address = {Marbella, Spain},
year = {2026},
pages = {},
}