Computer Vision and Pattern Recognition (CVPR 2026)
Revisiting Pose Sensitivity in Splat-based Computed Tomography
under Sparse-view Reconstruction
Kiseok Choi
Hyeongjun Cho
Inchul Kim
Min H. Kim
KAIST
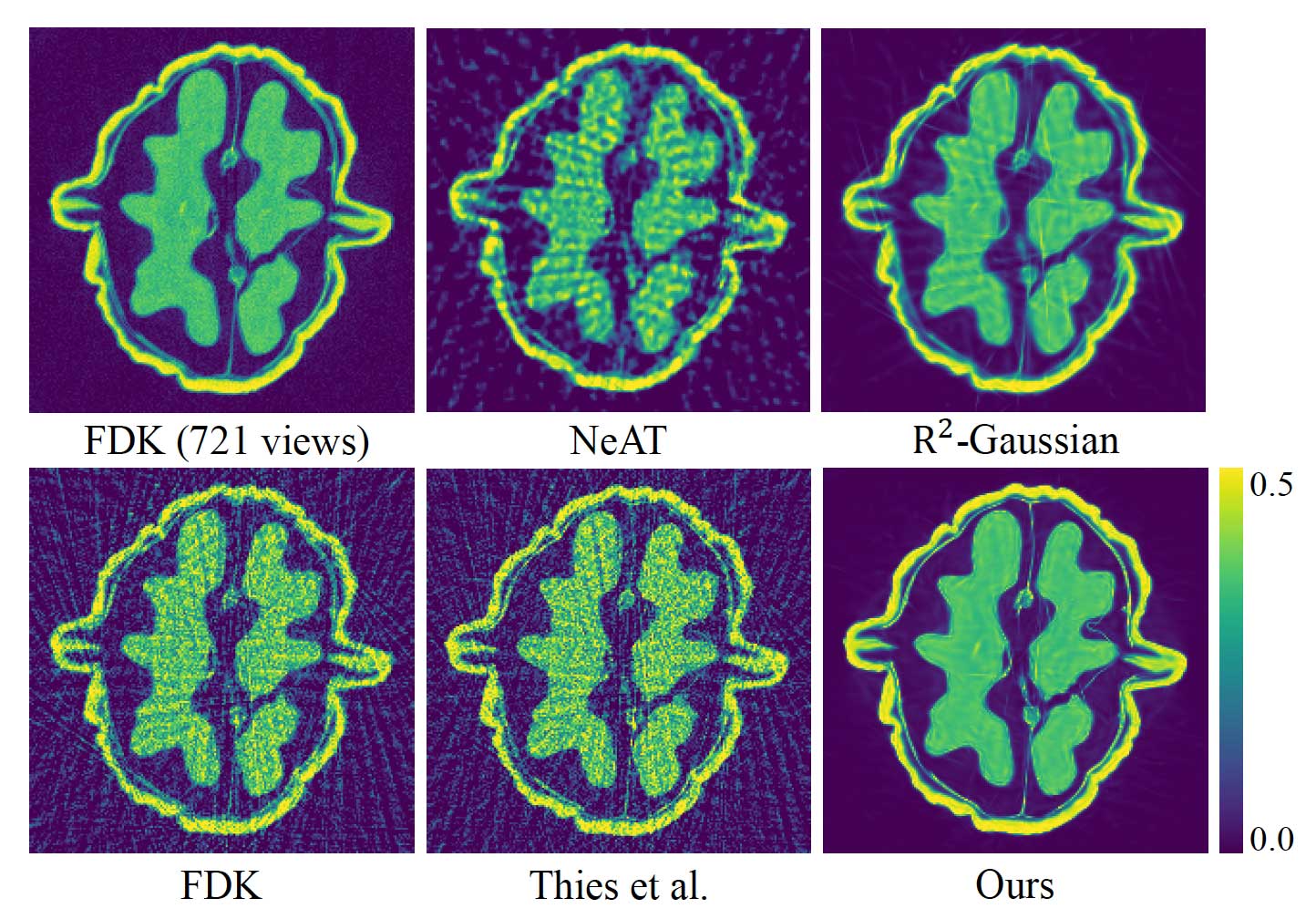
Reconstruction of a real walnut from cone-beam CT
using FDK [8] (721 views), joint reconstruction–calibration methods
(NeAT [30], Thies et al. [39]), R2-Gaussian [48], and our
method (others use 75 sparse views). FDK suffers from severe
radial artifacts and blur. NeAT reduces noise but introduces directional
streaks. Thies et al. improve edges but leave stripe
artifacts. R2-Gaussian shows needle artifacts from pose errors.
Our self-calibrating splat-based method suppresses these artifacts
while preserving fine details, highlighting the importance of geometric
calibration in real sparse-view CT.
Presentation
Abstract
X-ray computed tomography (CT) reconstructs volumetric
representations of objects from projection images obtained
by transmitting X-rays through a target. Recent splat-based
tomography, which represents a volume as a continuous
distribution of 3D Gaussians, has demonstrated both high
reconstruction quality and fast convergence in cone-beam
sparse-view CT. However, when deployed in real CT systems
with limited and non-uniform view distributions, we
observe distinctive streak and strip artifacts that are far
more pronounced than in conventional reconstruction methods.
Through detailed analysis, we show that these artifacts
primarily originate from pose inaccuracies in the acquisition
geometry rather than from view sparsity itself. We revisit
pose sensitivity in the splatting formulation and derive
a stable gradient-based framework that jointly refines geometric
parameters during reconstruction. Our study not
only identifies how pose perturbations propagate through
the differentiable projection operator but also reveals why
splat-based CT is particularly vulnerable to geometric misalignment.
The resulting formulation remains lightweight
and easily integrable into existing pipelines while substantially
improving reconstruction fidelity under real-world
sparse-view conditions.
BibTeX
@InProceedings{Choi_2026p2_CVPR,
author = {Kiseok Choi and Hyeongjun Cho and Inchul Kim and Min H. Kim},
title = {Revisiting Pose Sensitivity in Splat-based Computed
Tomography under Sparse-view Reconstruction},
booktitle = {IEEE Conference on Computer Vision and
Pattern Recognition (CVPR)},
month = {June},
year = {2026}
}